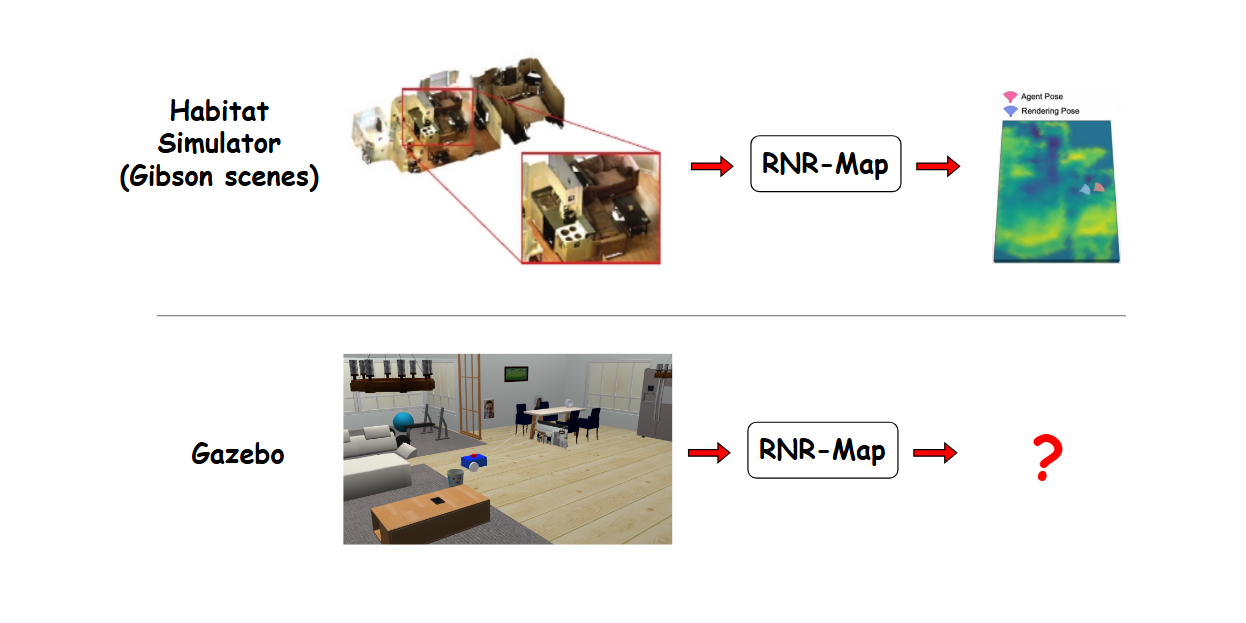
Renderable Neural Radiance Map (RNR-Map) + Gazebo (part 1)
Deploy RNR-Map (trained in Habitat simulator) into Gazebo + ROS2 environment for Visual Navigation
Deploy RNR-Map (trained in Habitat simulator) into Gazebo + ROS2 environment for Visual Navigation
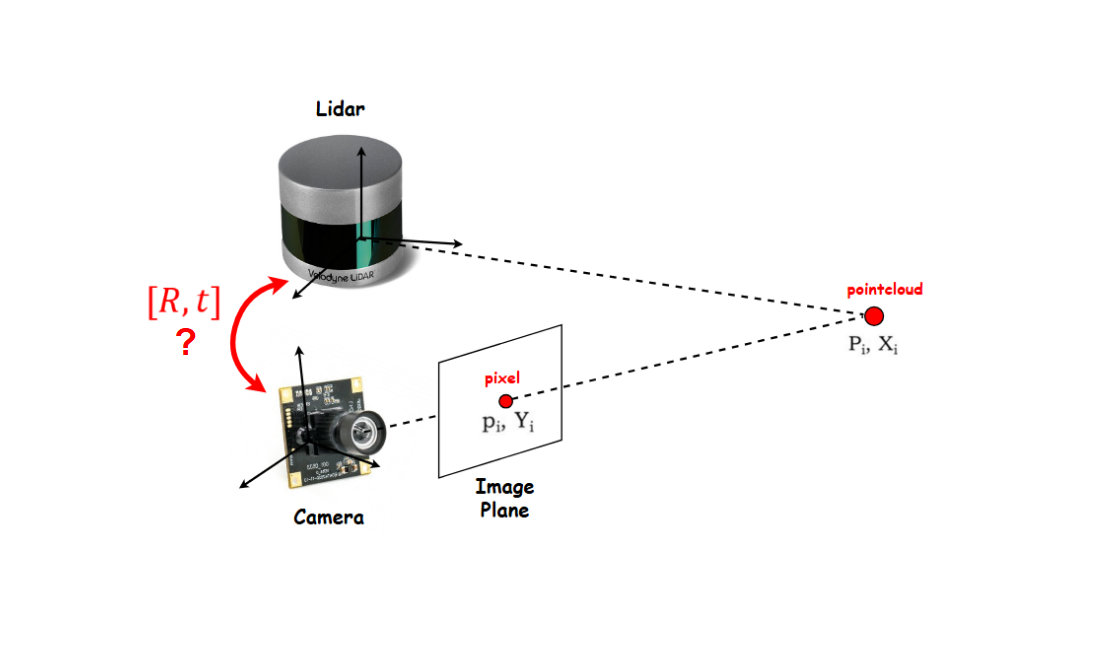
Python implementation (with vectorization) for MI-based Camera-Lidar extrinsic calibration.
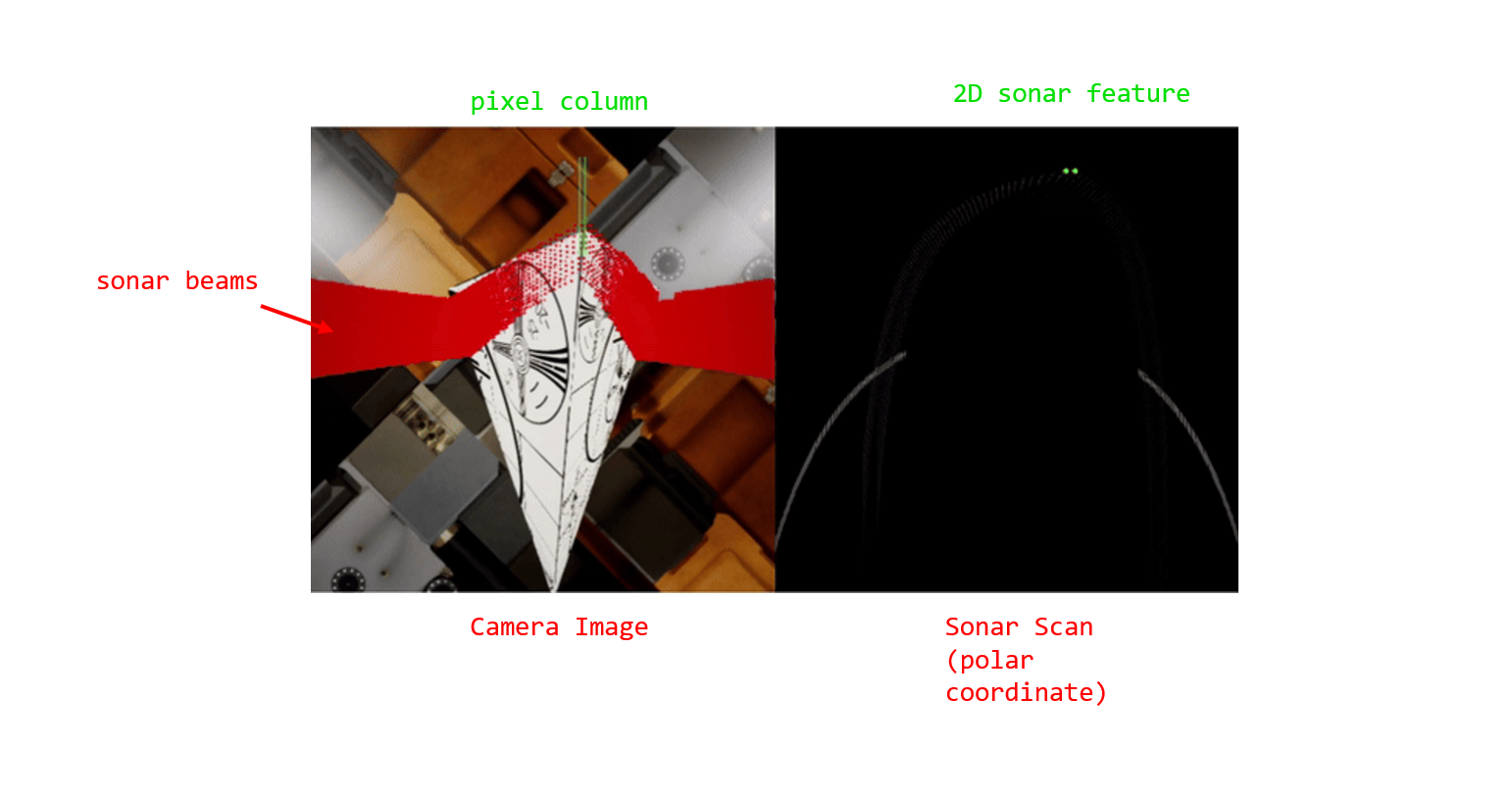
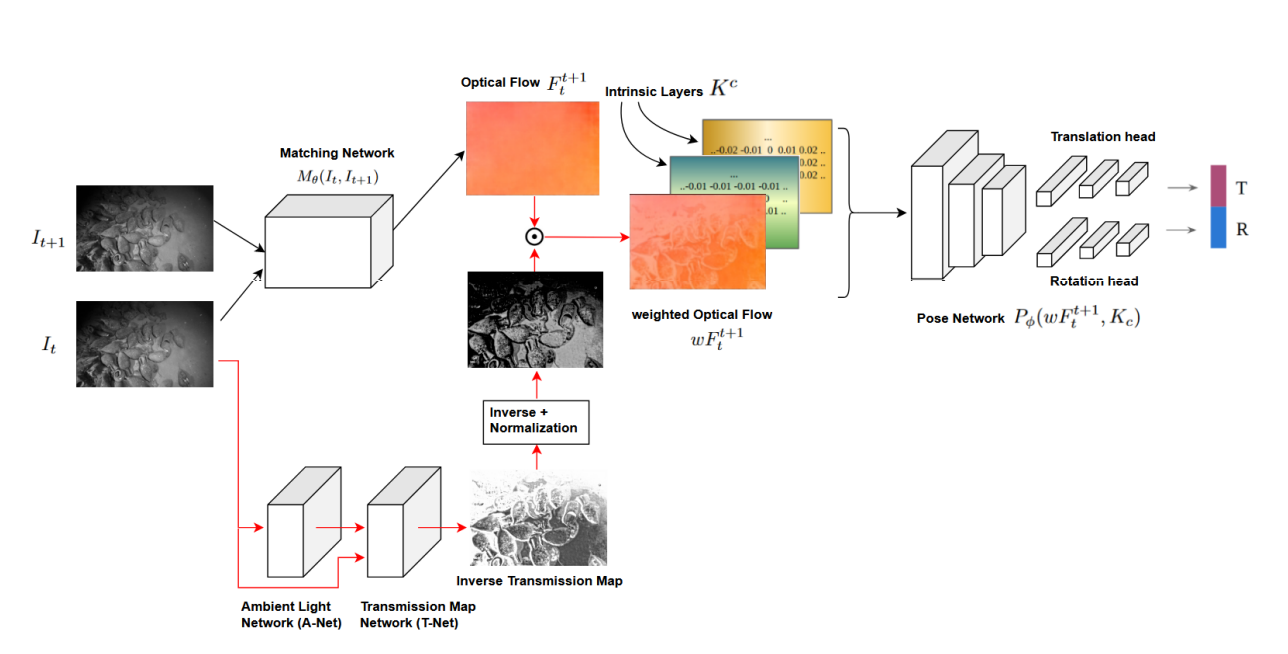
Correcting Scale Ambiguity of Monocular SLAM with Absolute Sonar Range Measurements, utilizing captured data from HoloOcean simulation (Unreal Engine).
(to be updated)
(to be updated)